|
1985/9
No.10 |
1. 老年と聴力 | 3. 軽量高感度バイモルフ式圧圧電加速度 | 4. 液中微粒子計の開発 | 5. 土地利用計画の指針 | ||||
リオン㈱環測技術部 新 敷 茂
1. はじめに
 |
|
写真 液中微粒子計数器KL-01
|
液体中に懸濁するミクロン単位の微粒子は、精度の高まった近年の製薬業、半導体工業、油圧機器工業等の産業分野で、歩留りや信頼性、機械駆動部の摩耗などが問題になり、コンタミネーションコントロール(汚染管理)の必要性が叫ばれている。
液体中に浮遊している微粒子の測定法は、計数法と質量法とに大別され、一般に前者は粒子数の少ない場合、すなわち汚染の進行していない液体に、後者は粒子数の多い汚染した液体に対して適用される。
計数法の中で顕微鏡法と自動式粒子計数器法は、現在日本工業規格(JIS-B-9930)で、作動油中の微粒子に対しての測定法が制定されている。
顕微鏡法は、試料を平面フィルター上に濾過捕集し、顕微鏡を用いて、直接肉眼で粒子の大きさを識別し、計数する。しかし、この方法には多くの時間、労力と高度の熟練を要する為に、操作が容易で、短時間に測定結果が得られる自動粒子計数が可能な液中微粒子計が求められていた。従来、市販されていた液中微粒子計は外国製品だけで、1セット一千万円以上の大変高価な、しかも大がかりなシステムであった。そこで、操作性のよい安価でコンパクトな液中微粒子計があれば、商品としてかなり多数の需要が見込めると考え次に述べる微粒子計を開発した。
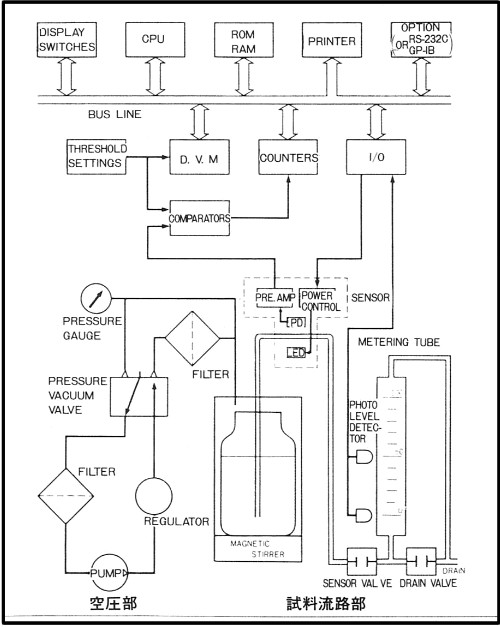
2. 液中微粒子計の構成 (図1参照)
今回開発した微粒子計は、波高分析、各制御等のアナライザ部と、ポンプ、試料チャンバ、流量計等のサンプリング部が一体となった、KL-01と粒子検出部(センサ)とで構成されている。
センサは、測定粒径範囲によって型式が選択でき、1~40μmの測定にはKS-60が、3~100μmではKS-61が用意されている。なお、現在1μm以下の粒子を測定出来るセンサーも開発中である。
 |
|
図1. 自動式液中微粒子計数器のブロックダイアグラム
|
3. 光遮断型粒子検出器
3-1 測定原理 (図2参照) 微粒子を個別に測定する液中微粒子計の測定原理は、光を利用するもの、電気伝導度を利用するもの、顕微鏡を使用した画像解析による方法がある。
|
|
|
|
図2. 測定原理
|
|
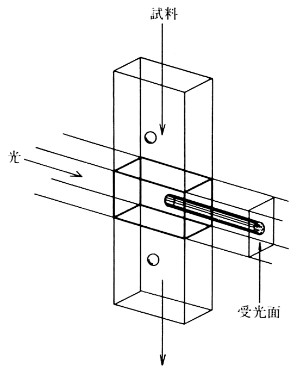
KS-60とKS-61は光を利用した方法の一つで、光遮断方式と呼ばれている。光遮断方式とは、光線をさえぎる粒子によって生じる光量の変化から、間接的に粒子の大きさを測定する方式である(図3参照)
3-2 応答特性
粒径に対する応答信号の大きさを、従来の光遮断理論では粒子の投影面積に比例すると考えられていた。
しかし、粒子に光が照射された現象であることから、光散乱方式の空気中の微粒子に広く適用されているMieの散乱理論と同様な取扱いで厳密に計算してみると、応答曲線は複雑な変化を示すことが明確になった。
これは粒径と光の波長が同程度の領域では、干渉によって散乱係数(光が粒子によって散乱する度合い)が大きく振動するので、直線性がなくなるためと考えられる。(図4、図5参照) このことは、図-4に示す様にMie理論、従来の光遮断理論、KS-60による実測値の三者を比較してみると、実測値とMie理論による計算値はよい一致がみられ、波長と粒径とが近い領域では、従来の光遮断理論が適用できなくなり、Mie理論を適用する必要があることがわかる。
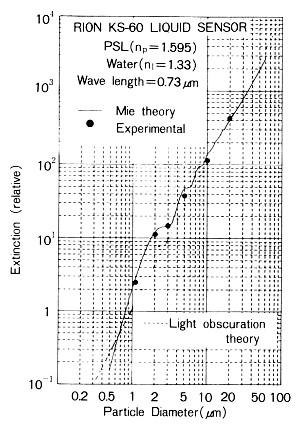 |
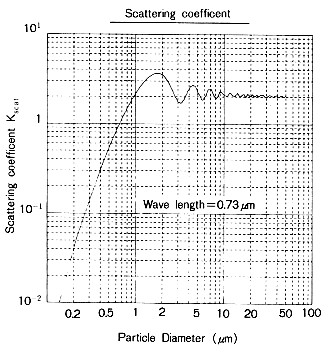 図5. 散乱係数 |
|
図4. Mie理論と光遮断原理理論と測定値の比較
|
|
 |
 |
|
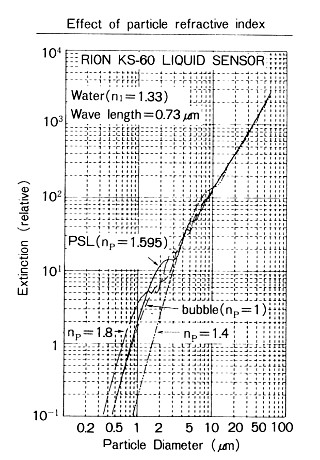
図6. 粒子の屈折率による応答特性
|
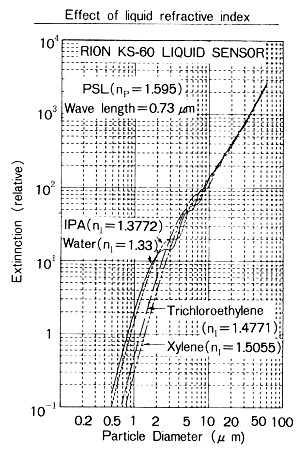
図7. 溶液の屈折率による応答反応
|
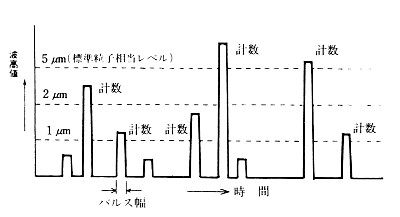
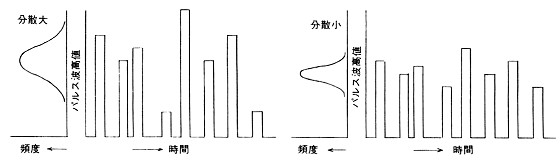
3-3粒径分解能(図-8参照)
理想的な装置を仮定すれば、均一粒子径の粒子径の粒子に対し、その応答信号の波高値はまったく等しいはずだが現実の装置では、粒子検出域内の光速密度の不均一性や、受光素子の光電変換効率のバラツキなどによって、応答信号は図-8に示すような分散状態を示す。
 |
|
図8. 粒径弁分解機能(単一分散分子)
|
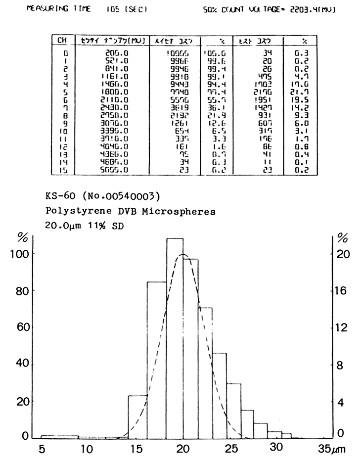
図-9に均一粒子に対するKS-60の応答信号の分析結果を示す。(図-9参照)
3-4 同時通過損失
粒子検出域は粒子の体積と比較して容積がはるかに大きいので、復数個の粒子が同時に粒子検出域に入る場合があり、その確率は試料の粒子数濃度に比例するが、センサは粒子検出域内の複数個の粒子を1個と計算し、かぞえ落し誤差となる。
 |
|
図9. KS-60の粒径弁別分解能
|
Fc=(Nt-Nm)/Nm×100〔%〕
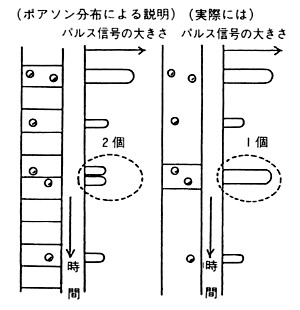
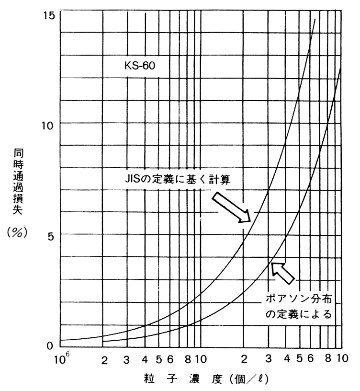
同時通過損失(率)は統計学的な理論に基づいた計算によって求められるが、現在米国およびヨーロッパで採用されている計算は、静的なポアソン分布による方法であり、一方、空気中の微粒子計の日本工業規格(JIS-B-9921)では動的要素をとり入れたポアソン過程による方法を採用している。(図10参照)
ポアソン分布による考え方は、試料の総量Vを粒子検出域の容積と等しい桝目N個で分割したと仮定し、1つの桝目に1個の粒子も入っていない確率Q0を求める。従って1個以上入っている確率は1-Q0となり、装置の計数値、つまり見かけの粒子数NmはN(1-Q0)となる。一方、ポアソン過程を適用する考え方は、図-10に示す様な桝目分割による理論の矛盾を除くため、粒子が粒子検出域を通過する時間Tと、その時間内に1個も通過しない確率からNmを求める。図-11はこの2種類の定義による差を図示したもので、JISに採用されてる計算法が、より厳格であることがわかる。
 |
 |
|
図10. 同時通過損失 |
図11. 2種類の定義による差
|
3-5 校正
純水中に均一粒子径の球状粒子(n=1.6)を分散させ、1個づつ粒子検出域に送り込むと、粒子径に比例した応答信号が出力され、その応答信号の大きさを波高分析器で分類し、全体の50%の数に相当する信号の大きさをその粒子群の代表値とする。また5,
6種類の粒子径の異なる標準粒子の代表値をプロットし、校正表として、ユーザーに渡している。従ってこの値を用いて粒径区分値の設定を行った場合、測定値は水(n=1.33)中の標準粒子相当径である。
4. おわりに
今後、ひきつづき開発目標として(1) 耐薬品性の向上、(2) 油中微粒子測定における校正液の製造の確立、(3) オンライン測定、などをとりあげている。