|
1992/4
No.36 |
1. 欧米における騒音事情 | 2. 航空機騒音の到来方向の変化の検出 | 3. 小型振動個人ばく露計の開発研究 | 4. inter-noise'91 in SYDNEY | 5. リアルタイムアナライザ SA-27を用いた自動測定のできる超小型残響時間計 |
騒音第一研究室 牧 野 康 一
1.はじめに
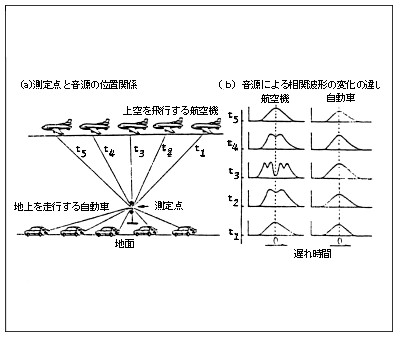
飛行場の周辺では航空機騒音の暴露状況を監視するため自動監視装置を設置して通年測定することが多い。しかし、自動監視は無人での測定のため航空機騒音とその他の騒音を判別する機能が欠かせない。この航空機騒音とその他の騒音の自動判別(航空機騒音識別)はリオン株式会社によって航空機騒音識別装置AN‐23として実用化されている。この航空機騒音識別装置は上下に配置した2本のマイクロホンで観測した信号の相互相関を計算し、そのピークの遅れ時間から騒音の到来方向の仰角を求めて上空音(航空機騒音)か地上音(その他の騒音)かを識別するものである(1)。
この装置を用い、上下だけではなく水平にもマイクロホンを配置して3次元的な騒音の到来方向の変化を検出する方法について検討を進めているが(2)、今回それを実時間で実行する装置を製作し実験的に有効性を検討したのでその結果を紹介する。
2.騒音の到来方向検出の原理
まず、上下に配置したマイクロホンによる航空機騒音識別装置の原理(1)について述べる。図1に示すように、2本のマイクロホンで観測される音圧波形には![]() の時間差がある。音源までの距離が十分に大きいとすると、この遅れ時間
の時間差がある。音源までの距離が十分に大きいとすると、この遅れ時間![]() は音の到来方向の仰角θとの間で次式のような関係になる。なお、hはマイクロホンの間隔、cは音速である。
は音の到来方向の仰角θとの間で次式のような関係になる。なお、hはマイクロホンの間隔、cは音速である。![]()
![]() は2本のマイクロホンで観測した音圧信号の相互相関関数から推定できるので式(1)から仰角θを計算することができる。
は2本のマイクロホンで観測した音圧信号の相互相関関数から推定できるので式(1)から仰角θを計算することができる。
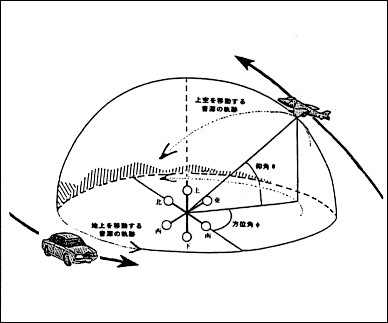
次に、この方法を応用してマイクロホン対を3組使って3次元的な音の到来方向を検出する方法(2)について述べる。図2に示すように同間隔のマイクロホン対を上下、東西、南北に3組配置する。南北の軸と音の到来方向のなす方位角をφ、上下の軸と音の到来方向のなす仰角をθとする。音源までの距離が十分に大きいとすると、各マイクロホン間の音の到来時間差![]() (上下)、
(上下)、![]() (東西)、
(東西)、![]() (南北)とφ、θとの間に次式のような関係が成り立つ。
(南北)とφ、θとの間に次式のような関係が成り立つ。
![]()
![]()
この式から航空機騒音識別装置を3系統使って処理すれば3次元的な音の到来方向の検出が可能であることがわかる。
 |
|
図1 航空機騒音識別の原理
|
 |
|
図2 音の到来方向検出のためのマイクロホン配置
|
3.装置の構成
次の2つの機能を実現するように装置を設計した。
(1) 「実時間で音の到来方向を表示する」
(2) 「一過性の騒音が発生したときの音の到来方向の変化の軌跡を表示する」
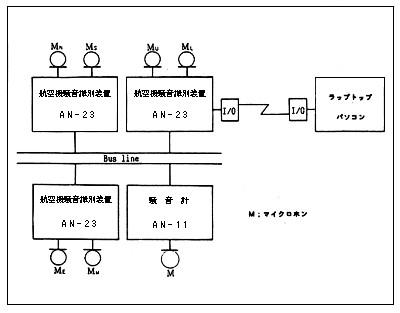
ハードウェア構成を図3に示す。リオンの環境騒音測定装置NA-33に航空機騒音識別装置を3台、ディジタル騒音計を1台組み込み、これにラップトップパソコンを組み合わせて全体の装置を構成し、現場での使用を考えてコンパクトにまとめた。航空機騒音識別装置は相互相関からマイクロホン対間の音の到来時間差を計算するためのユニットとしてのみ使用した。騒音計は一過性騒音の区間を検出するために使用した。識別装置と騒音計で得られたデータはインターフェースを介してパソコンに送り、音の到来方向の計算と表示を行う。
 |
|
図3 ハードウェア構成
|
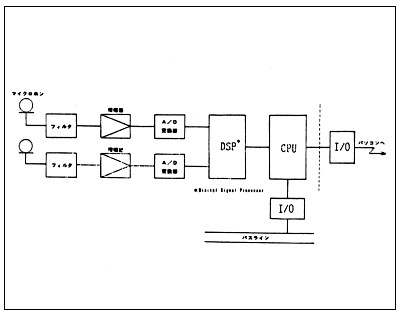
ここで航空機騒音識別装置のブロックダイアグラムを図4に示す。データの処理はDSPとCPUで分担して行われる。DSPでは相互相関関数を算出するが、その計算の前にプリエンファシスと線形予測残差変換による信号の白色化の前処理を行う。これは、プロペラ機の音のように周期的な成分を強く持つ場合の相関関数が周期的になりピークを鋭くし、検出性能を改善するものである。DSPはCPUから相互相関を計算した結果を読み込み、ピークの検出をして到来時間差を求める。DSPとCPUでの処理はソフトウェア的に行うので手順の変更がROM交換で済むというメリットがある。なお、パーソナルコンピュータとのデータ交換は航空機騒音識別装置のうちの1台にRS-232Cインターフェースを付加して行った。この装置は2台の航空機騒音識別装置や騒音計とのバスラインを使ったデータ交換も行う。
 |
|
図4 航空機騒音識別装置ブロックダイアグラム
|
次にパソコンに送られたデータの処理手順について述べる。まず(1)の「実時間での音の到来方向の表示」処理を行う。送られたデータから到来方向を計算して表示を行う。この処理は0.3秒に1回のスピードで行うことができた。このとき騒音レベルを監視して10dB以上大きくなる山が観測されたら実時間処理を中止して次の(2)の「騒音発生中の音の到来方向の変化の軌跡の表示」処理はピーク騒音レベルより10dB小さいレベルを超えている間のデータを保存・表示し、処理が終了したら(1)の処理に戻り繰り返して行う。
4.実験例
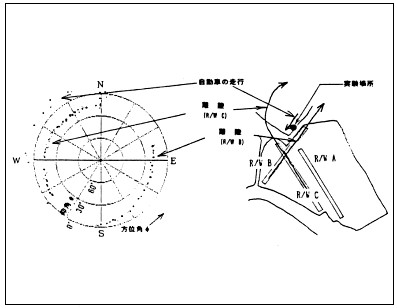
ここで、この装置を使って現場で実験した例を示す。まず東京国際空港(羽田空港)の近くで行なった実験例について述べる。実験場所は図5に示すようなB滑走路とC滑走路からの離陸音と脇の道を走る自動車の走行音が観測される場所である。マイクロホンの間隔は航空機騒音識別の場合と同じ1mとした。図5に実験結果の出力例(左側)と実験場所周辺の様子を表す図(右側)を示す。実験結果の図で外側の円は水平面でその内側の円は仰角30°、次の円が60°、中心点は天頂である。方角については上方を北として円周方向に取った。この図は2本の滑走路から離陸する航空機の音と近くの道路を通る車の走行音の軌跡を重ねて描いたものである。いずれも騒音レベルがピーク値から10dB小さい値を越えている間の軌跡である。航空機の離陸音の軌跡はB、C滑走路で異なることがよくわかる。自動車の走行音の軌跡は仰角が負のところに描かれている。これはマイクロホンを地面より高いところに設置したためである。騒音データと一緒にこのような音の到来方向の軌跡のデータを残しておけば音源の判別が可能となり、データ整理に役立つ。
 |
|
図5 B、C滑走路からの離陸音と自動車走行音の出力例 |
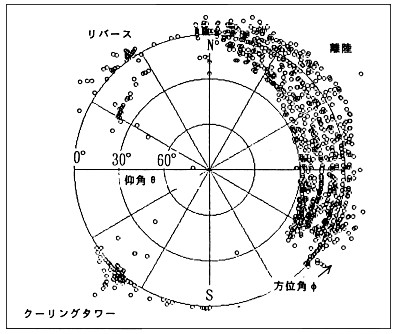
次に新東京国際空港(成田空港)の近くで行った実験例を示す。実験は滑走路近くの建物の屋上で行った。ここは離陸音、着陸時のリバース(逆噴射)音、空調のクーリングタワーの音が聞こえる場所である。実験は無人でほぼ一昼夜にわたり行った。ここでもマイクロホン間隔は1mとした。図6に収集した数時間分のデータを重ね描きした結果を示す。北から南東にかけての帯状の軌跡が離陸音である。重ね描きのため分かりにくいが、北北西方向の地上付近に集まっている点は着陸時のリバース音である。また南西方向の地上に集まっている点はクーリングタワーの音である。このことから余り動かない音源でも音の到来方向の検出ができ、音源の分類が可能となることかわかる。
 |
|
図6 固定音源を含む出力例
|
5.おわりに
音の到来方向の変化を検出・表示するハードウェアを製作し実験を行って機能を確かめた。その結果、音の到来方向の軌跡の情報を使うと今までの航空機騒音識別方法とは異なった観点からの処理が可能であることが示された。従来の方法では音の到来方向を3次元的に捉えていないので、複雑な飛び方をする航空機音の識別はできない。しかし3次元的に音の到来方向を捉えて処理を行えば、そのようなときにも識別が可能となる。また、音の到来方向の変化のデータを騒音データと一緒に残しておけば、後のデータ整理にも役立つ。
今後は実環境での実験、検討を進めて処理の高速化、航空機以外の音源への応用、マイクロホン間隔の短縮等を図って実用性を高めていきたい。
なお、本研究はリオン株式会社と共同で行ったもので、御指導、御協力いただいたリオンの林範章氏をはじめとする皆様に深謝いたします。また、研究を進めるにあたって御指導いただいた騒音振動第一研究室の山田一郎室長に深謝いたします。
参考文献
(1)林、岩橋、山田:「信号の白色化による航空機騒音識別手法の改良とハードウェアによる実現」、音響学会電気音響研究会資料EA89−38(1989.7)
(2)山田、牧野、林:「騒音の到来方向の3次元的な変化の検出による音源識別」、音響学会電気音響研究会資料EA90−21(1990.6)