|
2018/7
No.141 |
1. 巻頭言 | 2. ゾウと低周波音 | 3. 環境騒音観測システム NA-39シリーズ | ||||||||
|
|
|||||||||||
<研究紹介>
![]() ゾウと低周波音
ゾウと低周波音
騒音振動研究室 土 肥 哲 也
1 . はじめに
「パオーン」という鳴き声で知られるゾウ。普段は人間には聞こえないくらい低い音で会話をしているらしい。ゾウは5 Hz から数十Hz で発話できることが確認されており、この帯域の音は、空気吸収や地表面超過減衰などの影響を受けにくいために長距離伝搬しやすい。
そのため、ゾウは、遠距離にいる個体間で音声コミュニ ケーションを行うことが可能であると考えられている。
筆者がゾウと低周波音の研究を進めるきっかけになったのは、入江らによる市原ぞうの国(図1)における音カメラを用いた発話観測1)である。これらの調査から、
野生のゾウだけでなく日本にいる動物園のゾウも低周波音声を発していることが明らかになった。その後、筆者らはこの市原ぞうの国を中心としてゾウの低周波音声のモニタリングを行ったり、発話個体の特定方法を検討したりしてきた2),3)。本稿では、これらの研究の概要を紹介する。
|
|
|
図1 市原ぞうの国
|

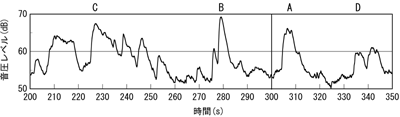
2. 低周波音声の観測例
図2は、市原ぞうの国におけるゾウの低周波音声の観測例2)であり、20
Hz 以下の成分を音圧レベルで示している。3分程度の間にA〜Dの箇所など数回以上の音声が観測されており、この時ゾウ舎にいた12 頭のゾウが会話をしていた可能性が示唆される。これまでのモニタリングの結果では、ゾウは5〜
20 分に1回程度の頻度で低周波音声を発することがわかっている。日に2回行われるショーが終わりゾウ舎に戻ってきた後や、出産後、久しぶりにゾウ使いと再会した時、初めてのゾウに会った時など何かしらの行動の前後や、感情が変化する時に低周波音声が頻繁に発せられる傾向がみられる。
1回の発話時間は、図2のとおり数秒〜十数秒である。 ゾウの呼吸の周期は十数秒といわれており、人間よりも1回の発話時間が長い場合がある。音圧レベルは、人間と同様に相手との距離や状況により臨機応変に変えることがわかっている。
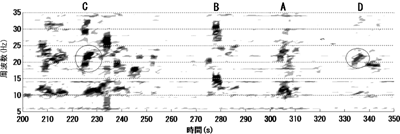
図3は、図2に示した音声データのスペクトログラムを示しており、10〜35 Hzの周波数成分が観測されている。図中Aの音声は、12 Hz と倍音の24
Hz が同時に観測されている。図中Bの場合は、15 Hz が基本周波数に なっておりAに比べて高い。図中CおよびDの音声で は、21 Hz 成分が時間とともに高域に変化している。これらの倍音構造は、声帯における流体自励振動という発話メカニズムで説明できる。
図2と図3に示した計測結果からは、この時ゾウ舎にいた12 頭のどのゾウの音声かは特定できないが、重い (大きい)ゾウは基本周波数が低くなることがわかっている4)ため、観測した声の基本周波数や倍音構造などの違いから発話したゾウが特定できる可能性がある。また、ゾウが他の個体の音声を識別できるという先行研究に基づけば、声紋を観測することで個体を識別できる可能性もある。図3に示したようなゾウの「声紋」データを蓄積し、パターン認識をすれば会話の種類が明らかになり、更に、声紋パターンとゾウの仕草やゾウ使いとのやり取りなどを総合してゾウの行動との対応が見出せれば、ゾウが発する低周波音声を人間がある程度理解できる日が来るかも知れない。
|
|
|
図2 ゾウの低周波音声の観測例(20 Hz 以下)
|
|
|
|
図3 ゾウの低周波音声のスペクトログラム
(図2のデータと対応) |
3. 超低周波音の可聴化装置
人間の可聴周波数を超える音を観測するには可聴化装置が便利である。例えば、超音波を発するコウモリの観測用に開発されたバットディテクターはすでに市販されており、当所の敷地内でも日が沈むと暗闇の中を飛ぶコ
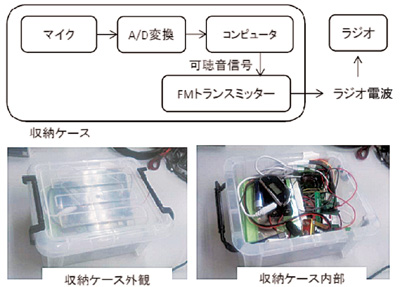
ウモリを検知することができる。これに対して、超低周波音の可聴化装置は市販されていない。人間は超低周波音をほとんど知覚することができないため、例えばゾウの低周波音声の有無を知るには低周波音計の画面を注視しなければならない。一方で画面を注視するとゾウの挙動を観察することが困難になる。この経験から筆者が試作した超低周波音の可聴化装置を図4に示す。この装置は、小型コンピュータを用いて超低周波音の大きさに応じた音程の異なるブザー音(可聴音)を1秒間隔で発生させることができる。音圧レベルの低い超低周波音を計測する場合、計測器を手に持つと手の揺れによる低周波音信号がノイズとして観測されてしまうことがあるため、本装置は地面などに置き、ブザー音はFMトランス
ミッターを用いて携帯ラジオで聞く方式を採用してい る。ゾウを観察しながら超低周波音の有無をブザー音と して知ることができる。
ゾウの低周波音声をより理解するためには、低周波音の大きさだけでなく、声紋などの周波数情報もリアルタ イムに知ることが有用である。図3の声を15
倍速で再生すると、感情のようなものを感じることができる。このため、ゾウが発する5〜数十 Hz の音を10 〜 20 倍に周波数変換して実時間で音を聞くことのできる装置(エ
レファントボイスディテクター)に改良を進めているが、技術的な問題が多く未だ完成していない。
|
|
|
図4 超低周波音の可聴化装置の試作例
|
4. マイクアレイを用いた発話個体の特定
スリランカでは近年、野生のゾウが人間の住む村に接近する問題が発生しており、ゾウの接近を音などで検知する研究が進んでいる5)。一方、筆者らは、市原ぞうの国において低周波音声を発しているゾウの個体同定をする目的でアレイ観測を試みている3)。
図5および図6は、音源同定をする際のマイクアレイ配置を2種類示している。図5の丸印は、サブアレイ方式と呼ばれるマイクロホンの配置で、3つのマイクロホンを4
m 間隔で配置したサブアレイ1と、同様の配置 のサブアレイ2で構成される。図5は、市原ぞうの国における検証実験の結果を示している。両アレイにおける音の到来時間差に基づく音源方向の推定結果を点線で示しており、点線が交わる位置が音源と考えられる。この時の飼育場には1頭のゾウがゾウ印の位置にいたことを確認しており、このことからサブアレイ2つを用いた音源位置の推定精度は数m程度であることがわかる。
|
|
|
図5 発話したゾウの推定位置を調べるマイクアレイの配置と推定結果例
(サブアレイ方式) |
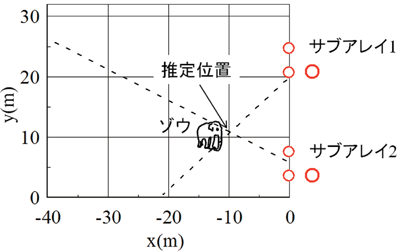
図6は、ゾウのいる領域をマイクロホンで囲うように配置したアレイのイメージである。20 Hz 以下の音を対象にした場合、マイクロホン間隔を波長17
m 以下にす ることで遅延和法により発話したゾウの位置を特定でき ることが数値シミュレーションと検証実験で明らかになっている3)。この“囲う方式”のマイクアレイに必要なマイクロホンの数は、一般的なラインアレイの場合の半分である。また、超低周波音の場合は波長が長いため、
現実的なマイクロホンの数で検知が可能となる。現在、音源位置の特定を現場でリアルタイムに行うシステムを開発しており、発話したゾウを特定し、その時の行動を観察することで音声の意味を解明したいと考えている。
今回紹介した超低周波音の可聴化装置や、音源同定装置は、ゾウの発話観測のみならず工場などにおける超低周波音の音源探査や、アレイ外側の音源からの到来方向推定などにも適用可能である。今後は様々な低周波音調査の現場で応用を試みたい。
|
|
|
図6 発話したゾウの推定位置を調べるマイクアレイの配置イメージ
(音源を囲う方式) |

参考文献
1) 入江尚子,大脇雅直,財満健史,長谷川壽一:アジアゾウの低周波コミュニケーション,日本音響学会講演論文集 (2009.3).
2) 土肥他:低周波音- 低い音の知られざる世界-,コロナ社 (2017).
3) 土肥哲也,岩永景一郎,小林知尋,中島康貴:超低周波音源の位置推定に関する検討 ―マイクロホン配置と推定精度 についての屋外実験―,日本音響学会騒音・振動研究会,
N-2017-51 (2017).
4) Christian T. Herbst et al. : How Low Can You Go? Physical Production
Mechanism of Elephant Infrasonic Vocalizations, Science, Vol. 337, 6094,
pp. 595-599 (2012).
5) Chinthaka M. Dissanayake, Ramamohanarao Kotagiri, Malka N. Halgamuge,
Bill Moran : Improving accuracy of elephant localization using sound probes,
Applied Acoustics, Vol. 129, pp. 92-103 (2018).