|
1999/4
No.64 |
1. 20世紀と環境 | 2. 表面保護をした多孔質材料の吸音特性 | 3. 磁気録音機の元祖 ワイヤーレコーダ | ||||||||
|
|
6. サーボ加速度センサ LS-10シリーズ | ||||||||||
1.はじめに
リオンの振動センサは圧電セラミックを使用した加速度センサが従来から主流でしたが、最近では地震計等にサーボ式の加速度センサが多く使用されています。サーボ式加速度センサは圧電式とは動作原理が異なっていて、低雑音でDC加速度まで測定できるのが大きな特徴です。そこでリオンの代表的なサーボセンサLS-10シリーズを紹介いたします。
 |
|
|
LS-10シリーズにはLS-10、LS-10C、LS-10J(C)がありますが、使用目的によってコネクタ、保護ケース等の違いがあるだけで、振動を検出する部分は同じ構造をしており基本的な性能も同一です。LS-10シリーズは感度は3V/G、DC〜100Hzの周波数範囲で応答がフラットで
LS-10は感震器組み込み用のサーボセンサです。LS-10を内蔵するサーボ式の感震器はLS-13D等があり、直角座標の3成分の地震動を検出するためにLS-10が3個使用されています。
LS-10Cは1mのコードとコネクタが付いた一般市販のサーボセンサで、主としてビルや橋梁等の大型構造物の低周波振動を測定するために使用されています。
LS-10J(C)は新幹線500系及び700系のぞみのセミアクティブ制御に使用されています。このサーボセンサによって新幹線の揺れが半分以下に低減し、乗り心地が良くなっています。LS-10J(C)は走行中に飛散する石、氷、水滴等で壊れることがないよう、センサ本体が頑丈な鉄ケースで保護されています。
3.サーボ加速度センサの構成
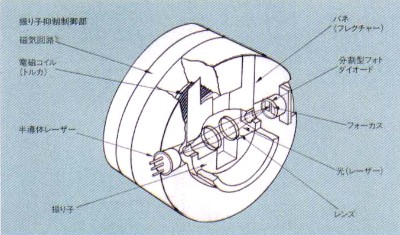
サーボセンサは図1に示すように振り子、振り子位置検出器、振り子に電気力を作用させるアクチュエータ、装置全体を制御する電器回路の四つの部分で構成されています。外部からの加速度が作用するのは振り子です。重りとバネによる振り子はバネの片端がケースに固定されていて、加速度が加わるとケースに対して変位します。振り子の重りの質量は概ね1g程度ですがバネが非常に柔らかいため共振周波数は非常に低くなっており、僅かな加速度でも振り子は大きく変位します。
振り子のケースに対する変位は、振り子の共振周波数よりも低い周波数域では加わる加速度に比例しています。
振り子位置検出器は振り子のケースに対する位置変位を検出するセンサです。振り子位置検出器はコンデンサ式、光学式等の方式がありますが、LS-10シリーズでは独自の光学式を採用しています。これについては次項で説明します。
アクチュエータは振り子に取り付けられるコイルとケースに取り付けられる磁気回路で構成されています。この構成はマグネットとコイルを使用した動電型スピーカーのようなもので、コイルに電流を流して振り子に電磁力を作用させるために使用されます。
電気回路は振り子位置検出器で得られた電気信号を増幅してアクチュエータのコイルに電流を流すために使用されます。
 |
|
|
サーボ制御を理解し易くするために、紙上で簡単な実験をします。アクチュエータを構成してしているコイルは振り子に取り付けられているためコイルに電流を流すとコイルと磁気回路間に電磁力が発生して、振り子は元の位置からずれますが、もしも電流が流れるのと同時に電磁力と大きさが同じで方向が逆向きの加速度が加わると、二つの力は打ち消されるので振り子は動かなくなります。
これとは逆に、振り子に加速度が加わった時に、コイルに加速度に応じた電流を流して振り子を静止状態にすることができます。外来の加速度が変化したり、方向が変わった場合等にはコイルに流す電流の大きさと方向を加速度に応じて変化させれば振り子を静止状態にすることができます。
サーボセンサでは振り子位置検出器が取り付けられていて、振り子の位置変位を検出しているため、振り子の位置変位に比例した最適の電流を自動的に流して振り子を静止状態にすることができます。
振り子の静止状態への自動制御は、電気回路のフィードバック動作によって行われます。
このように、サーボ加速度センサは、バネが固くなって振り子がケースと一体になって動作しています。この固くなったバネはサーボ動作の電磁力で発生したものです。
サーボ加速度センサでは、外来の加速度にバランスして振り子を静止状態にするための電流は加速度に比例しているので、コイルを流れる電流を測定すると加速度が分かります。
5.LS-10シリーズの振り子位置検出器
振り子位置検出器の性能はサーボ加速度センサのノイズ等の性能を大きく支配します。
サーボセンサの従来からの最も一般的な振り子位置検出器はコンデンサ方式ですが、LS-10シリーズは従来のものとは異なった新しい光学方式を採用しています。
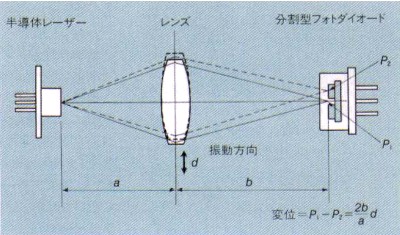
この光学式振り子位置検出器はレーザーダイオード、2素子の分割型フォトダイオード、レンズを使用していて、従来の方式よりも正確に振り子の位置を検出することができます。
構造を図1及び図 2 に示します。レーザーダイオードと2素子分割型フォトダイオードが振り子を挟んでケースの対向する位置に取り付けられています。振り子にはレンズが取り付けられていて、レーザー光を2素子分割型フォトダイオードにフォーカスさせます。振り子に加速度が加わらない場合には振り子がセンターの位置にあるため、フォトダイオードの真ん中に光が入射し、二つの受光部は等量の光を受けます。加速度が加わって振り子が変位した場合にはフォーカススポットの位置がずれるので、二つの受光部の一方は
入射光量が増加し、他方は減少します。このため二つの受光部の光量差から振り子の位置が分かります。
この方式が振り子の位置を従来方式よりも精度良く検出できるのは、レーザーダイオードを用いているためフォーカススポットの径が非常に小さく、位置検出の分解能が優れているためです。
 |
|
|
仕様ではサーボ加速度センサの周波数範囲はDC〜100Hzとなっています。 20XX年にこの仕様を見た宇宙人がLS-10を沢山買ってくれました。UFOに取り付けるためです。UFOには窓が無いため外の状態が分からないので、サーボ加速度センサをUFOに取り付け、加速度を検出してUFOを航行させるのが目的でした。しばらくすると宇宙人からLS-10を取り付けたUFOが墜落した、その原因はLS-10がDC加速度を計れないためだ、仕様に反するとクレームがありました。UFOが一定加速度で墜落中にサーボ加速度センサは加速度を感じなかったため、乗っていた宇宙人は墜落に気が付かなかったというのです。担当技術者は最初宇宙人の言うことを疑いましたが、念のため実験してみると、LS-10が9.8m/s2の加速度で落下しているにもかかわらずセンサの出力は加速度ゼロを示したのです。LS-10は地上に置いた場合には重力の1G加速度に対して3V出力するのは確かです。担当技術者は困り果ててしまいました。